
HeartSway: Exploring Biodata as Poetic Traces in Public Space
DIS 2026 To Appear
Human traces scattered across urban landscapes can signify our everyday lives and societal vibrancy in subtle and poetic forms. In this paper, we explore how designed technology can engage biodata as evocative traces. To this end, we present the design, implementation, and evaluation of HeartSway, an interactive hammock that captures a user’s heart rate and micro-movements as traces and replays them as an embodied experience for the next visitor. Through a qualitative field study (N=10), we find that HeartSway evokes feelings of connection, curiosity about prior users, and appreciation for shared human vitality. Our work contributes to understanding anonymous archival biodata as a design material for experiential urban traces. We offer design considerations for intimate asynchronous encounters between strangers in public spaces and for reimagining public amenities.
MotionSmith: A Sketch-Based Design System for Automata Making
CHI 2026
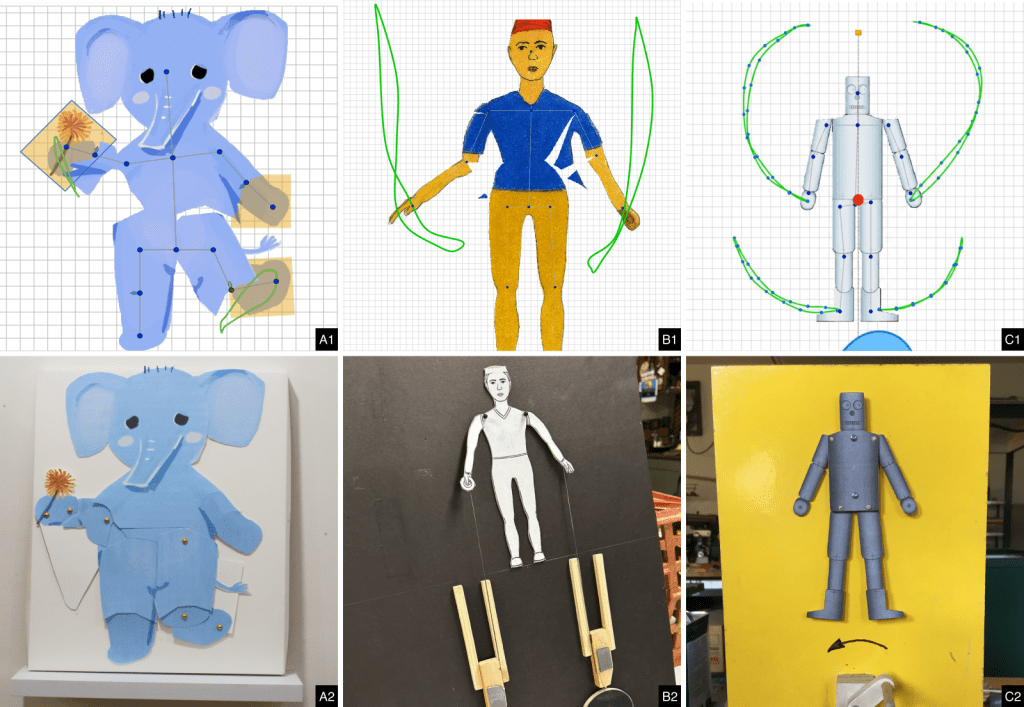
This paper introduces MotionSmith, a sketch-based design system to support automata makers. MotionSmith enables users to sketch a desired motion, explore system-generated mechanisms to realize the motion, refine the chosen mechanism, and export fabrication-ready files. We developed the system through a year-long iterative process, including participatory design (PD) with three professional automata artists. Insights from this collaboration emphasized the importance of prioritizing creative intent over literal sketch fidelity, enabling fluent iteration across design stages, and ensuring mechanically simple, fabricable outcomes. In the final PD phase, artists successfully used MotionSmith to design and build automata, validating the system’s feasibility and identifying opportunities to extend educational resources and fabrication guidance.
Rethinking Technological Solutions for Community-Based Older Adult Care: Insights from `Older Partners’ in China
CSCW 2025
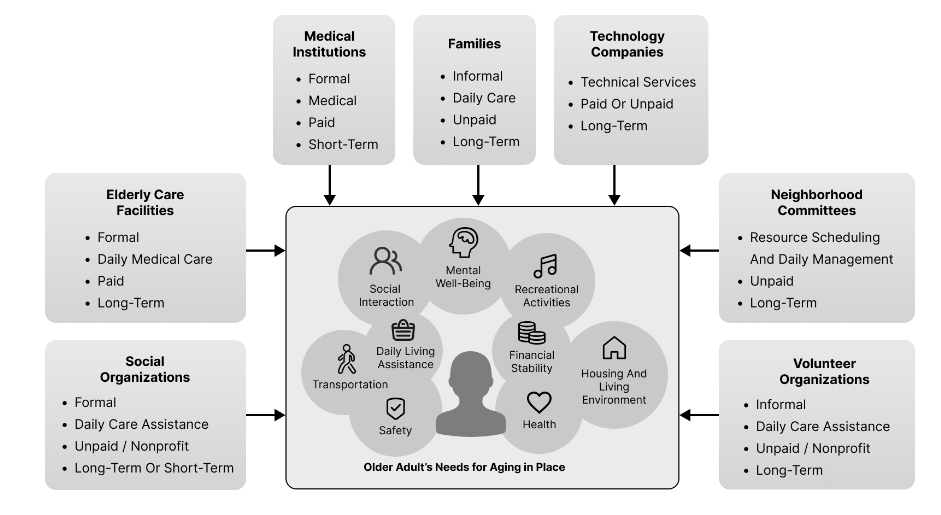
Aging in place refers to the enabling of individuals to age comfortably and securely within their own homes andcommunities. Aging in place relies on robust infrastructure, prompting the development and implementation ofboth human-led care services and information and communication technologies to provide support. Through along-term ethnographic study that includes semi-structured interviews with 24 stakeholders, we consider thesehuman- and technology-driven care infrastructures for aging in place, examining their origins, deployment,interactions with older adults, and challenges. In doing so, we reconsider the value of these different formsof older adult care, highlighting the various issues associated with using, for instance, health monitoringtechnology or appointment scheduling systems to care for older adults aging in place. We suggest thattechnology should take a supportive, not substitutive role in older adult care infrastructure. Furthermore, wenote that designing for aging in place should move beyond a narrow focus on independence in one’s home toinstead encompass the broader community and its dynamics.

Effects of Social Robotics in Promoting Physical Activity in the Shared Workspace
2022
This paper presents a design study exploring the effects of a social robot in facilitating people to participate in light-intensity exercises after a long duration of sitting in a shared workspace. A smart system based on a trolley-like robot, called the Anti-Sedentary Robot, was developed to realize the health intervention as follows. To start, the robot could navigate to the location of a sedentary worker to invite them to participate in a temporal voluntary service of returning items. Upon the invitation being accepted, the robot would then move with the worker to return the item and simultaneously provide guidance for physical exercises. Based on the Anti-Sedentary Robot, a within-subject study (n = 18) was carried out to examine exercise motivations and psychological benefits of our design by making comparisons between a robot-guided intervention and a human-guided intervention. Quantitative results showed that the health intervention based on the Anti-Sedentary Robot increased intrinsic motivations and provided acute mental benefits compared to the human-guided intervention. Qualitative findings suggested that the Anti-sedentary Robot could combat work-related sedentary behaviors due to the pleasant system interactivity and the provision of reciprocal voluntary tasks. We discuss implications for the future development of social robots for office vitality based on our research findings.
